品牌
生产厂家厂商性质
深圳市所在地

一体化关节设计安全便捷多自由度协作机器人
¥96000
深圳泰科伺服ADM系列可插入式精密直流全数字伺服驱动器
面议
专为机器人关节模组设计一体化伺服驱动器
面议
泰科伺服APX系列通用精密可编程交直流伺服驱动器
面议
泰科智能IDM系列智能可编程直流伺服驱动器 增量编码器反馈 模拟量控制
面议
深圳泰科智能IBL系列微型可编程直流伺服驱动器 RS232/CAN控制
面议
泰*作机器人_适合多种工作环境
¥80000
泰*作式机器人_协助工业自动化改造
¥80000
六轴协作机器人柔性关节机械手臂
¥80000
深圳泰科机器人外接伺服驱动器模块
¥16
泰*作机器人
¥18
深圳泰科智能机器人RJU系列关节模组
¥12
泰科关节机器人具备哪些优势?
一、编程简单
可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可。
二、安装快捷
泰科对协作式机器人的设置进行了变革,对于未经训练的操作员而言,从开箱到取出协作式机器人、安装机器人、到*简单作业编程,通常不到一个小时便能完成。
三、部署灵活
别受限于机器人。泰科机器人轻巧、节省空间、易于重新部署在多个应用程序中,而不会改变您的生产布局。将协作式机器人移至新的流程中十分快捷容易,让您能灵活自动处理几乎任何手动作业,包括小批量或快速切换作业。协作式机器人能够复用为经常性作业设置的编程。
四、协作性与安全性
现在您可以替换掉从事肮脏、危险和枯燥工作的人工操作员,以减少重复性劳损和意外受伤。在数千台多轴机器人中,有 80% 的机器人在无安全保护防护装置(经过风险评估后)、旁边无人工操作员的情况下运转操作。
| 参数 | 单位 | RJS14 |
| 减速器速比 | -- | 101 |
| 减速器背隙 | arcmin | 10 |
| 转动精度 | arcmin | 1 |
| 电机极对数 | -- | 6 |
| 电机额定功率 | W | 117 |
| 电机额定电压 | V | 48 |
| 电机额定电流 | A | 5.7 |
| 电机额定转速 | rpm | 3000 |
| 电机额定转矩 | Nm | 0.42 |
| 电机转矩常数 | Nm/A | 0.078 |
| 反电动势系数 | V/krpm | 8.93 |
| 关节重量 | kg | 1.75 |
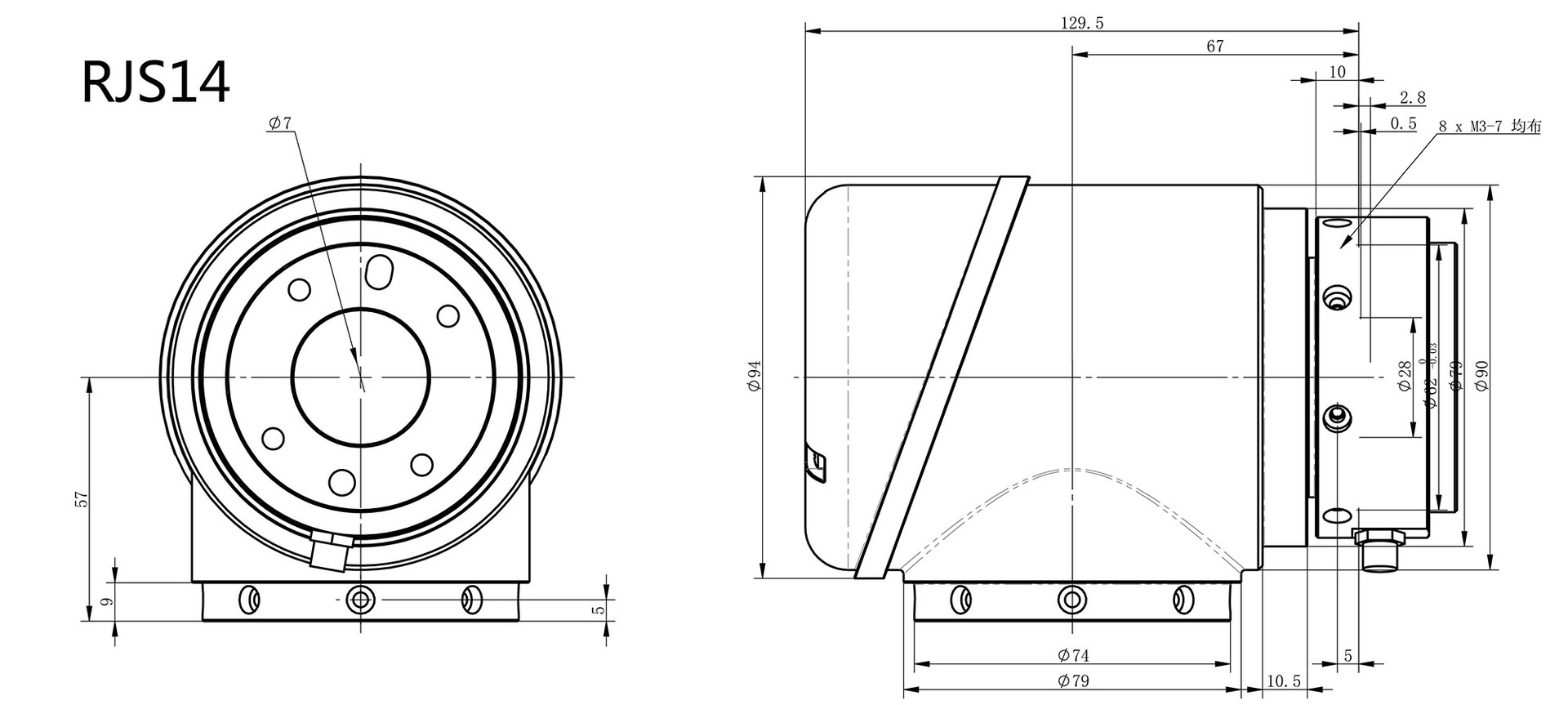
| 关节直径 | mm | 90 |
| 关节高度 | mm | 104 |
| 关节长度 | mm | 130 |
| 许用负载转矩 | Nm | 28 |
| 平均负载转矩 | Nm | 13.5 |
| 大瞬时转矩 | Nm | 54 |
| 额定转速 | rpm | 30 |
| 大转速 | rpm | 40 |
| 增量编码器 | P/R | 20000 |
| 值编码器 | Bit | 17/19 |
机械尺寸外形图: