
品牌
经销商厂商性质
武汉市所在地
加拿大Mecademic公司介绍
旋转六脚机器人是由Jonathan Clolome在他的大学期间开发的。2013年成立的Mecademic公司,正在建造可支付得起的工业级教育机器人。我们成立Mecademic公司的原因,是因为我们对现在的教育机器人的选择感到泄气。一个教育学院要花至少2万美元去买一个工业机器人或者买一个玩具级的机械手。随着DexTAR的出现,我们建造了一个新型的专业的但廉价的教育机器人。
Mecademic公司是école de technologie supérieure (éTS)学校的控制与机器人实验室(CR)的分公司,ETS是加拿大zui大型和有工业导向的学校。这个公司是由Jonathan Coulombe在完成大学电子工程的学业时创建的。在加入ETS之前,Jonathan已经作为精确机械师工作了十年,在业余时间还精确制作廉价机器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究团队,开发具有创新的旋转型六脚机器人。
Prof. Ilian Bonev作为Mecademic的科学导师,他因一个名叫Paralle MIC的并行机器人而出名。Prof. Ilian Bonev现在是加拿大精确机器人研究协会的主席,和CR的负责人。他还教一些有关工业机器人的高级实践课程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生产的工业机器人,及UR,KUKA,KAWADA等生产的协作机器人。
Mecademic公司在加拿大蒙特利尔市区的办公室里设计,生产和组装台式机器人。
双臂 SCARA教育机器人
总描述
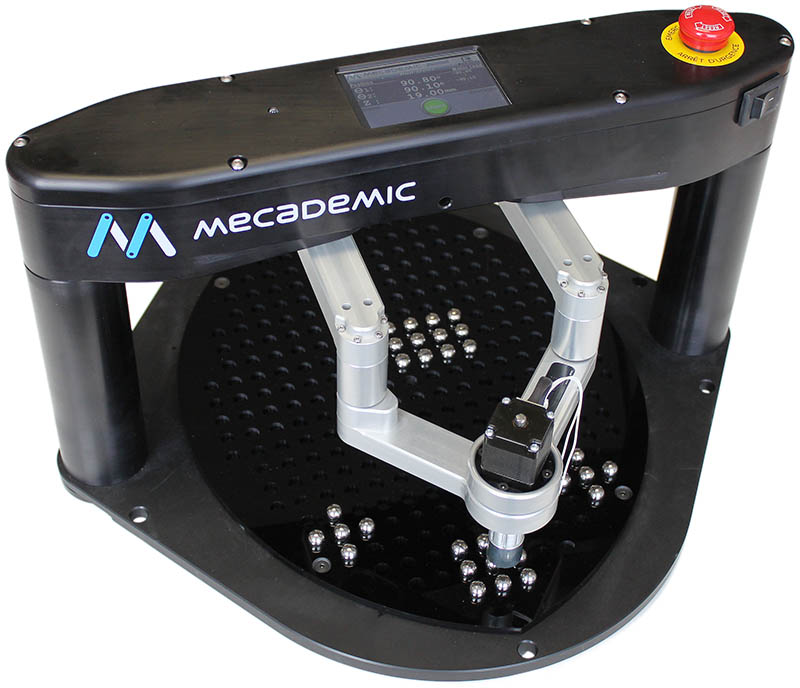
DexTAR(Twin-Arm Robot)是一个三轴双臂SCARA机器人,专门为教学和培训之用。它主要的核心是五杆机械。这个5杆机械师并行机器人的教学范例,是传输不同的机器人概念的教学模板。尽管DexTAR机器人是一个教育机器人,但它满足工业机器人的各种标准。它包括精确加工铝材料,两个90W的伺服马达驱动,一个步进马达和线性执行器。这个机器人也配有高精度加码器。
DexTAR机器人利用电磁块来拾取钢球,但是定制的末端器很容易安装。这个时尚的台式机器人满足所有的机器人安全标准,并配有内部锁定保护盖(图片未显示),DexTAR是非常轻巧,便携和廉价可支付型的,不再使用笨重的教导器。
DexTAR是程控型的,而且也是离线型的。模拟和离线程控软件是在WINDOWS操作系统下运行的。在模拟前,程序可以由用户自己利用简单的机器人编写语言编写,然后再编辑。可编写程序是准备模拟,或通过USB电缆直接从计算机下载到机器人的内存里。存储在机器人内存里的程序通过机器人的触摸屏来执行(不需要连接计算机)
教学材料也包括在内,以便容易把DexTAR机器人融入现成的课程里。
技术参数:
Footprint | 435 mm × 420 mm (17.1 in × 16.5 in) |
Weight | 10.2 kg (22.5 lb) |
XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* |
Axis 1 & 2 encoder resolution | 0.011° |
Axis 1 & 2 max speed | 720°/s |
XY max linear speed | 300 mm/s (11.8 in/s) |
Z axis stroke | 19 mm (0.75 in) |
Z axis resolution | 0.025 μm (0.001 in) |
Z axis max speed | 120 mm/s (4.7 in/s) |
Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation.
Power | 24 V / 9.17 A (external power supply with country-specific power cord) |
Touch screen | 480 × 320 pixels |
Tool interface | 1 output 24 V |
Communication | USB 2.0 port |
Connectivity | Connector for third-party control card* |
可选项-运输车NANUK 960


旋转六脚机器人是由Jonathan Clolome在他的大学期间开发的。2013年成立的Mecademic公司,正在建造可支付得起的工业级教育机器人。我们成立Mecademic公司的原因,是因为我们对现在的教育机器人的选择感到泄气。一个教育学院要花至少2万美元去买一个工业机器人或者买一个玩具级的机械手。随着DexTAR的出现,我们建造了一个新型的专业的但廉价的教育机器人。
Mecademic公司是école de technologie supérieure (éTS)学校的控制与机器人实验室(CR)的分公司,ETS是加拿大zui大型和有工业导向的学校。这个公司是由Jonathan Coulombe在完成大学电子工程的学业时创建的。在加入ETS之前,Jonathan已经作为精确机械师工作了十年,在业余时间还精确制作廉价机器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究团队,开发具有创新的旋转型六脚机器人。
Prof. Ilian Bonev作为Mecademic的科学导师,他因一个名叫Paralle MIC的并行机器人而出名。Prof. Ilian Bonev现在是加拿大精确机器人研究协会的主席,和CR的负责人。他还教一些有关工业机器人的高级实践课程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生产的工业机器人,及UR,KUKA,KAWADA等生产的协作机器人。
Mecademic公司在加拿大蒙特利尔市区的办公室里设计,生产和组装台式机器人。
双臂 SCARA教育机器人
总描述
DexTAR(Twin-Arm Robot)是一个三轴双臂SCARA机器人,专门为教学和培训之用。它主要的核心是五杆机械。这个5杆机械师并行机器人的教学范例,是传输不同的机器人概念的教学模板。尽管DexTAR机器人是一个教育机器人,但它满足工业机器人的各种标准。它包括精确加工铝材料,两个90W的伺服马达驱动,一个步进马达和线性执行器。这个机器人也配有高精度加码器。
DexTAR机器人利用电磁块来拾取钢球,但是定制的末端器很容易安装。这个时尚的台式机器人满足所有的机器人安全标准,并配有内部锁定保护盖(图片未显示),DexTAR是非常轻巧,便携和廉价可支付型的,不再使用笨重的教导器。
DexTAR是程控型的,而且也是离线型的。模拟和离线程控软件是在WINDOWS操作系统下运行的。在模拟前,程序可以由用户自己利用简单的机器人编写语言编写,然后再编辑。可编写程序是准备模拟,或通过USB电缆直接从计算机下载到机器人的内存里。存储在机器人内存里的程序通过机器人的触摸屏来执行(不需要连接计算机)
教学材料也包括在内,以便容易把DexTAR机器人融入现成的课程里。
技术参数:
Footprint | 435 mm × 420 mm (17.1 in × 16.5 in) |
Weight | 10.2 kg (22.5 lb) |
XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* |
Axis 1 & 2 encoder resolution | 0.011° |
Axis 1 & 2 max speed | 720°/s |
XY max linear speed | 300 mm/s (11.8 in/s) |
Z axis stroke | 19 mm (0.75 in) |
Z axis resolution | 0.025 μm (0.001 in) |
Z axis max speed | 120 mm/s (4.7 in/s) |
Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation.
Power | 24 V / 9.17 A (external power supply with country-specific power cord) |
Touch screen | 480 × 320 pixels |
Tool interface | 1 output 24 V |
Communication | USB 2.0 port |
Connectivity | Connector for third-party control card* |
可选项-运输车NANUK 960
旋转六脚机器人是由Jonathan Clolome在他的大学期间开发的。2013年成立的Mecademic公司,正在建造可支付得起的工业级教育机器人。我们成立Mecademic公司的原因,是因为我们对现在的教育机器人的选择感到泄气。一个教育学院要花至少2万美元去买一个工业机器人或者买一个玩具级的机械手。随着DexTAR的出现,我们建造了一个新型的专业的但廉价的教育机器人。
Mecademic公司是école de technologie supérieure (éTS)学校的控制与机器人实验室(CR)的分公司,ETS是加拿大zui大型和有工业导向的学校。这个公司是由Jonathan Coulombe在完成大学电子工程的学业时创建的。在加入ETS之前,Jonathan已经作为精确机械师工作了十年,在业余时间还精确制作廉价机器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究团队,开发具有创新的旋转型六脚机器人。
Prof. Ilian Bonev作为Mecademic的科学导师,他因一个名叫Paralle MIC的并行机器人而出名。Prof. Ilian Bonev现在是加拿大精确机器人研究协会的主席,和CR的负责人。他还教一些有关工业机器人的高级实践课程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生产的工业机器人,及UR,KUKA,KAWADA等生产的协作机器人。
Mecademic公司在加拿大蒙特利尔市区的办公室里设计,生产和组装台式机器人。
双臂 SCARA教育机器人
总描述
DexTAR(Twin-Arm Robot)是一个三轴双臂SCARA机器人,专门为教学和培训之用。它主要的核心是五杆机械。这个5杆机械师并行机器人的教学范例,是传输不同的机器人概念的教学模板。尽管DexTAR机器人是一个教育机器人,但它满足工业机器人的各种标准。它包括精确加工铝材料,两个90W的伺服马达驱动,一个步进马达和线性执行器。这个机器人也配有高精度加码器。
DexTAR机器人利用电磁块来拾取钢球,但是定制的末端器很容易安装。这个时尚的台式机器人满足所有的机器人安全标准,并配有内部锁定保护盖(图片未显示),DexTAR是非常轻巧,便携和廉价可支付型的,不再使用笨重的教导器。
DexTAR是程控型的,而且也是离线型的。模拟和离线程控软件是在WINDOWS操作系统下运行的。在模拟前,程序可以由用户自己利用简单的机器人编写语言编写,然后再编辑。可编写程序是准备模拟,或通过USB电缆直接从计算机下载到机器人的内存里。存储在机器人内存里的程序通过机器人的触摸屏来执行(不需要连接计算机)
教学材料也包括在内,以便容易把DexTAR机器人融入现成的课程里。
技术参数:
Footprint | 435 mm × 420 mm (17.1 in × 16.5 in) |
Weight | 10.2 kg (22.5 lb) |
XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* |
Axis 1 & 2 encoder resolution | 0.011° |
Axis 1 & 2 max speed | 720°/s |
XY max linear speed | 300 mm/s (11.8 in/s) |
Z axis stroke | 19 mm (0.75 in) |
Z axis resolution | 0.025 μm (0.001 in) |
Z axis max speed | 120 mm/s (4.7 in/s) |
Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation.
Power | 24 V / 9.17 A (external power supply with country-specific power cord) |
Touch screen | 480 × 320 pixels |
Tool interface | 1 output 24 V |
Communication | USB 2.0 port |
Connectivity | Connector for third-party control card* |
可选项-运输车NANUK 960







{kind=link}