
DKJ-510cx 除尘阀智能电动头,电动风口调节电动执行器

产品简介
对于震动较大的场所,应经常检查紧固件是否松动,接插件接触是否良好,锁紧是否可靠并及时维修。
使用频繁的执行机构每运行一年半应大修一次。 应仔细清洗零部件,更换全部紧固件及磨损的零部件 应清除所有的润滑脂,重新装填新的润滑脂。在检修各电气装置时,注意更换损坏的原件及老化的导线,更换全部微动开关 。
详细信息
一、除尘阀智能电动头,电动风口调节电动执行器概述
电子技术的飞速发展,新的电子及电力元器件不断产生,使得控制系统功能及性能产生很大的飞跃,传统的模拟电路电动执行器已不能满足控制系统的需要,新颖的智能型数字电动执行器,以其丰富的功能,优异的性能,*的人机界面,已获得广泛应用。
DKJ型角行程电动执行机构是DDZ型电动单元组合仪表中的执行单元,它接受调节单元(或计算机)信号,自动地操纵执行机构完成调节任务,广泛地用于电站、化工、石油、冶金、建材、供热、轻工、水处理等行业。它可以输出转矩和90度转角。DKJ型电动执行机构,配上各种电动操作器,可完成调节系统的“手动←→自动”的无扰动切换,及时对被调节对象的远方手动操作。
我公司生产的执行机构位置发送器均采用新的传感元件,参考国外公司的新电路,集电源变压器,整流、稳压、功放、恒流于一体,制成模块(M)使执行机构的可靠性、稳定性更高,从而使系统更加安全可靠。
智能型数字电动执行器的机械设计与传统模拟电动执行器基本相同,构成智能型数字电动执行器,将伺服放大器、位置发送器结合在一起,组成了新的电子电路,完成输入与接口技术,增加了*的CPU故障诊断,识别及逻辑判断,在性能方面,利用软件技术,完成了自适应定位计算,使得定位误差更小,控制精度提高,弥补了机械设计上的不足,伺服电机控制采用了过零触发可控硅电力器件,控制方法简单,现场调试极为方便,提高了整机运行可靠性,其电气控制特点如下:
1.电气控制电路采用了微处理器(CPU)硬件、软件技术使得现场调试极为简单,通过就地操作按钮(手动开关),进入调试菜单,将阀位运行到开极限位置,确认、然后再关到极限位置(机械定位上下限),确认,内部微处理器将自动识别这两个极限位置,并将其数值储存。阀位信号输出(4-20mA),经软件计算,自动对应执行器始点至终点范围,现场调试工作既可完成。
2.改进了电机制动功能去掉机械摩擦制动,依据不同轴力矩输出调整不同的电子制动时间。
3.强大的故障自诊断功能,在整机运行期间微处理器(CPU),连续监控执行机构运行状态,如输入给定信号(指令)、电机运行力矩、电源相位,经自诊断发出各种故障、状态、信息并做出自动纠正和报警输出。
4.三相供电电动执行器,设计电路可自动纠正,供电电源相序,在接线时无需考虑供电电源相序,简化安装过程。
5.断信号故障处理、正反作用、制动时间、不灵敏区等功能均通过字符代码以问答方式进行预置设定,在设计选项型时,对执行器要求完成不同的功能操作(开关型、远控型、调节型)均可在一台执行器上实现,简化了选型和调试过程减少了备品备件数量,即省资金,减少库存。
6.给定信号(指令)与阀位输出信号电隔离不共地消除共模干扰。
7.伺服电机控制采用过零触发电力器件,消除电源谐波污染。
8.非侵入式红外遥控操作。
9.工作电源 220vAc
380V三相三线、三相四线、相序自动识别、自动换相。
二、除尘阀智能电动头,电动风口调节电动执行器规格、型号
智能数字式角行程电动执行器(普通型)
型号 (普通型) | 给定信号(指令) | 额定负载 Nm | 额定行程 (°) | 额定额定 时间S |
DKJ-2100 | 给定信号(指令) 4~20mA阻抗100Ω | 100 | 在机械允许的范围内,数值大于45度均对应4-20mA阀位输出 | 25 |
DKJ-3100 | 250 | |||
DKJ-4100 | 600 | |||
DKJ-5100 | 1600 | |||
DKJ-6100A | 2500 | 40 | ||
DKJ-6100B | 4000 | 60 | ||
DKJ-7100 | 6000 | 100 |
智能数字式角行程电动执行器(户外型)
型号 (户外型) | 给定信号(指令) | 额定负载 Nm | 额定行程 (°) | 额定额定 时间S |
DKJ-2100W | 给定信号(指令) 4~20mA阻抗100Ω | 100 | 在机械允许的范围内,数值大于45度均对应4-20mA阀位输出 | 25 |
DKJ-3100W | 250 | 40 | ||
DKJ-4100W | 600 | 60 | ||
DKJ-5100W | 1600 | 100 |
智能数字式角行程电动执行器(直联式)
型号 (直联式) | 给定信号(指令) | 额定负载 Nm | 额定行程 (°) | 额定额定 时间S |
DKJ-2100Z | 给定信号(指令) 4~20mA阻抗100Ω | 100 | 在机械允许的范围内,数值大于45度均对应4-20mA阀位输出 | 25 |
DKJ-3100Z | 250 | 40 | ||
DKJ-4100Z | 600 | 60 | ||
DKJ-5100Z | 1600 | 100 |
智能数字式直行程电动执行器(普通型)
型号 (普通型) | 给定信号 (指令) | 输出推力 | 行程mm | 时间S |
DKZ-4100M DKZ-4200M DKZ-4300M | 4~20mA | 4000N | 10 16 25 | 25 |
DKZ-5400M | 6400N | 40 | 40 | |
DKZ-5500M | 6400N | 60 | 60 | |
DKZ-5600M | 16000N | 100 | 100 |
三、主要技术指标、执行标准
1.输入信号:开关量、模拟量4-20mA,阻抗100Ω
2.位置输出信号:4-20mA,阻抗≤750Ω
3.不灵敏区设置(死区):
0-25位数字设定,小值0.25%(1/4096)
4.定位误差:0.5~2%设定,正反作用输出,随机设定
5.阻尼特性(制动时间)
数字设定,数值范围0~20,小值为0,初始值1为5ms,终值20为800ms,可依据输出轴钮矩设定。
6.输入信号(指令)与输出(阀位)电隔离介质耐压2500V
7.数字显示:分辨率1%,范围0~99%
对应电信号4-20mA
8.远程操作:执行器端口输出:远控/现场、开、关操作(无源触点),触点电压及电流24VDC 0.5A1,在控制室内可优先对电动执行器实现远控操作。
9.断信号输出(无源触点)
可预置执行器输入信号中断状态下:全开、全关、任意位置或设定位置
10.设置角度45°~110°范围内任意数值对应4-20mA
11.电器限位设定范围:下限0~50%,上限50~*
12.工作电源:AC220V±10% AC380V±10% 50HZ
13.使用环境:-20℃~80℃ ≤95%RH
14.执行与参照标准 JB/T8219-1999、JB/T8220-1999、JB/T10233-2001、JB/T10387-2002
四、结构组成
整体智能数字显示式DKJ、DKZ电动执行器,主要是由伺服执行电路、机械减速机构、微电子电路及电力功率模块组成。
1.伺服执行电机:采用了鼠笼式,二相、三相电动伺服执行器 ,它们具有启动力矩大,启动电流小,正反向可逆运转。
2.机械减速机构:采用一级渐开线直齿轮和一级少齿差行量齿轮传动。它具有传动可靠、嗓声小、效率高等特点,不同规格的轴力矩输出,采用不同几何尺寸机械传动设计,以满足力矩输出要求。
减速 附加于手动操作机构,操作时只需将手板拉出,摇动即可,操作调整后复位。
3.微电子电路及电力功率模块:微电子、电力器件的飞速发展,我们将该技术应用到电动执行器中,在电路设计,器件的选择,软件开发做了重大改进,增加新的自诊断及检测功能,一机多种用途,更加适应当今自动化控制系统要求。
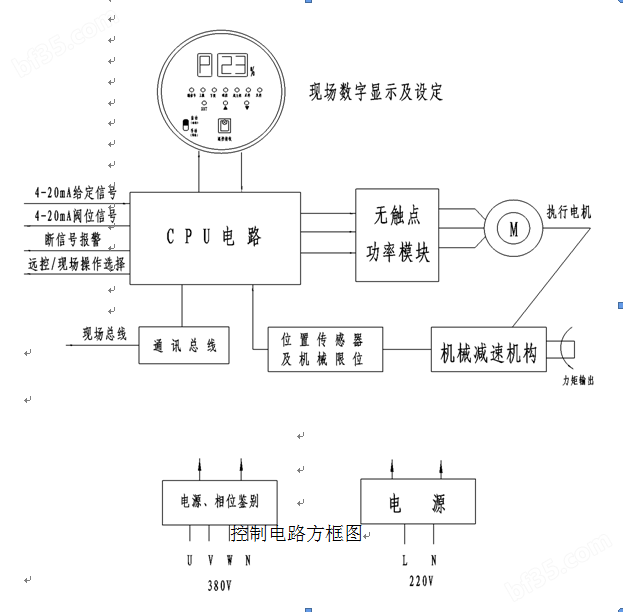
控制电路方框图
五、操作与调整(电气操作调整应注意电气安全及防护措施)
断信号指示灯灭,执行器将跟踪给定信号的变化做正反向运动,同时正反转指示灯做对应显示。给定4mA信号执行器运行到零位,数值显示00%,给定20mA信号执行器运行到90度,机械调整的上限位置凸轮动作,数值显示99%,上述过程说明执行器工作正常可投入运行。
机械调整1:
如果安装位置,运行行程和角度有所变化,需重新对电动执行器转角位置,行程距离做重新调整,步骤如下:
机械调整:在现场根据工艺和系统要求,调整好机械连杆,与阀门全开、全关的位置。再打开执行器电气盒,机械固定凸轮螺母,调整下限及上限凸轮,对应联接阀位开和关的位置(正作用),阀门全关时下限凸轮触动下限限位开关触点动作,下限指示灯亮;阀门全开时上限凸轮触动上限限位开关触点动作,上限指示灯亮。上述过程说明与机械铰链、阀门开关动作*,再拧紧固定螺母。机械连接任何一点的松动,卡死等现象,都将直接影响到整机运行,切不可粗心大意。
电气调试2:机械位置调整准确无误后就可进行电气调整(提示:注意安全用电)
调试“PXX”阀位显示值(阀位输出信号)
1.将面板手自动开关拨到“手动”位置
2.将定位器板设定键“SET”键按至“J 00”后,再按“▲”键,显示为“J 01”。
3.按“SET”键,面板显示“U XX”,按“▼”键至下限灯亮(关位位置),“U XX”显示在“U 01”或“U 02”数值。如果为“00”或其它值,需要调整执行器的位置反馈电位器松开电位器二个固定螺钉轻轻转动电位器,使“U XX”显示在“U 01”数值,同时紧固电位器的固定螺钉不应松动。
4.按“SET”键控制电路软件将自动记录下限位置。与此同时面板显示“Π XX”。
5.按“▲”键*限指示灯亮,“Π XX”显示在18~21数值。
6.按“SET”键确认上限位置,面板同时显示“P 99”值,表示电动执行器在全开位置时显示“99”对应阀位信号20mA电流信号值。
7.按“▼”键“P”值从显示“99”向减小数值变化,下限指示灯亮时“P”值应显示为“00”值,对应阀位信号为4mA电流信号值。
8.调试过程完毕后,表示执行器在关位与开位范围内对应4—20mA阀位信号线性输出,确切的说是电气阀位输出信号与机械位置取得了*。
- 调试“O XX”给定显示值(指令输入信号)
定位器板在出厂时已对给定信号进行了调整,电动执行器在平衡状态下阀位信号与给定信号数值是*的,如两者对应误差超过实际显示值(控制室至现场线路影响、控制室D/A精度转换误差等其它综合因素)可重新对给定信号调校,步骤如下:
1.将“SET”键按至“J 00”后连续按“▲”键,显示为“J 11”。
2.按“SET”键,显示“L XX”,由控制室或信号源给出4mA信号,“L XX”数值显示1~3数值。
3.按“SET”键确认记录4mA位置,同时数值显示为“H XX”,由控制室或信号源再给出20mA信号,“H”数值显示18~20数值。
4.按“SET”键确认记录20mA位置。给定数值显示“o 99”数字,说明控制室或信号源给定信号调试完毕。
- 改变正反作用
出厂时为正作用,如需要更改为反作用,按以下步骤进行:
1.按“SET”键至显示“F 00”
2.按“▲”,改变“F00”为“F01”,即为反作用
3.再按“SET”键至恢复显示“PXX”数值,说明在反作用情况下给定输入4mA显示“00”为开阀状态,给定输入20mA显示“99”为关阀状态。
1.按“SET”键至显示“F 00”,连续按“▲”,显示为“F 22”。
2.按“SET”键至显示“b XX”。
3.按“▲”、“▼”修改“b XX”值,当“b XX”为“b 00”时,表示在断信号时电动执行器停止在原始位置。当“b XX”为“b 01”时,表示在断信号时电动执行器停止在任意位置。
1.在“b 01”状态下按“SET”键,显示“C XX”值,该值表示在断信号时电动执行器停止在设置位置。
2.按“▲”、“▼”修改“C XX”值。修改范围:0~99。对应执行器的下限*限范围内的任意位置。
3.断信号时电动执行器所处的位置处理,应在现场对电动执行器安装基本调整后,再根据用户对系统控制的要求做相应的调整,确保控制系统控制的安全性。
六、接线图
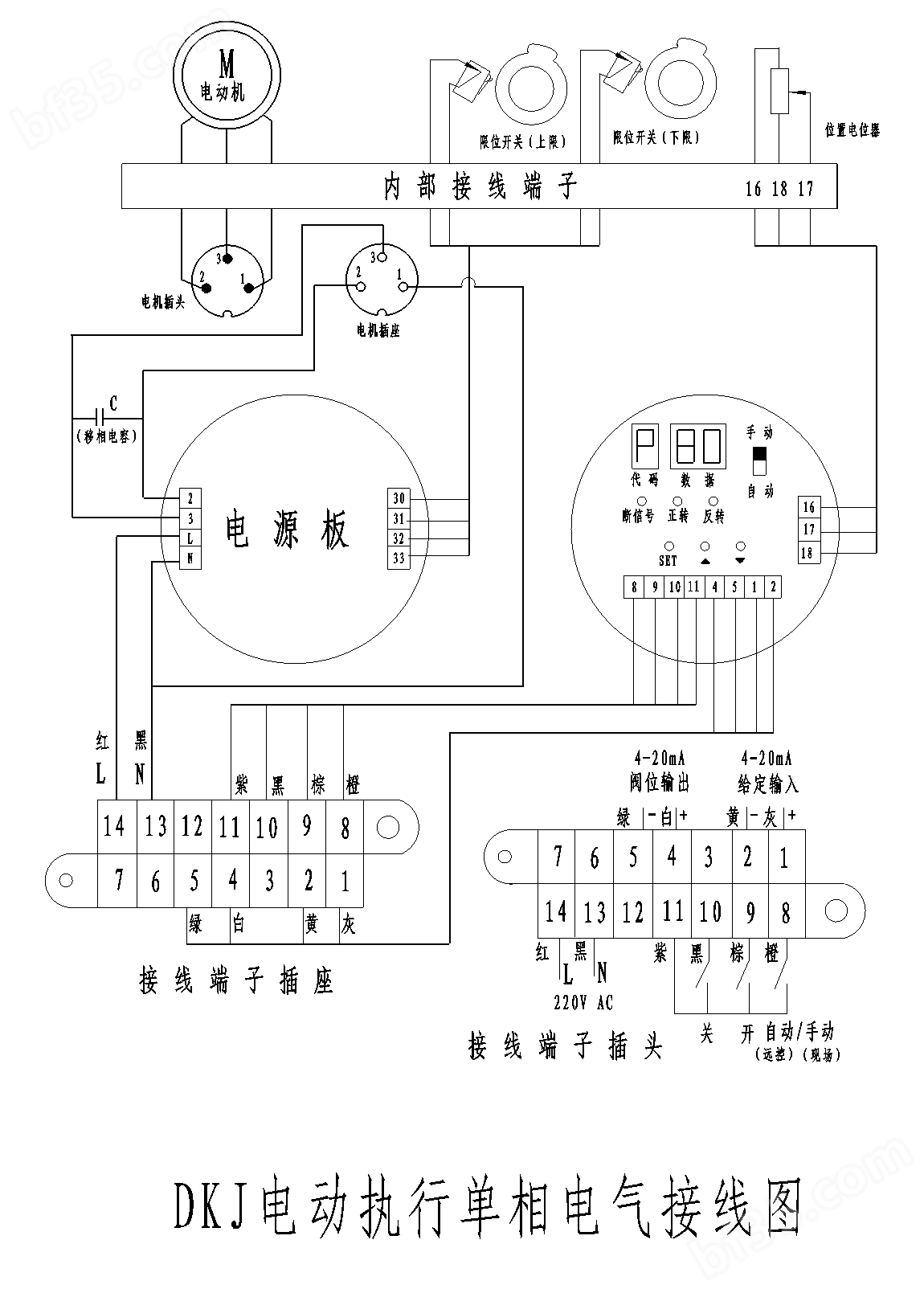
整体式智能型数字电动执行器接线图
适用于DKJ、DKZ系列,供电电源380V
七、贮存
产品贮存在温度-10~+40℃,相对湿度不大于80%的通风室内,周围空气不得含有对产品起腐蚀或其他损坏作用的介质。贮存期超过18个月的执行机构在使用前应更换减速器内的润滑剂。
八、保证事宜
在正常情况下,自发货之日起12个月本公司对产品免费维修。对于逾期或用户违反说明书的规定误安装或操作造成产品损坏本公司可应用户要求进行维修,但将收取相应的费用。